3 day emergency delivery
How Do Absolute Encoders Work?
Measuring system
To solve positioning problems in automation, it is often necessary to measure lengths and angles as exactly as possible.
In general there are two different measuring systems:
In general there are two different measuring systems:
Incremental Measuring Systems
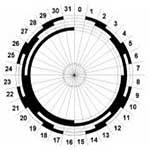
The principle of the incremental measuring system is the scanning of a line pattern on a glass or plastic disc (see Image). The states of the line pattern (transparent or not transparent) are converted into electronic pulses by an opto-electronic unit (e.g. transparent = 5V, not transparent = 0V).
The analysis of the signals is performed in an evaluation unit by counting up or down with each pulse. The current count is stored in digital form and is instantly available for evaluation.
However, this method has some serious disadvantages. It is possible that the result is continuously invalid due to signal glitches, unmeasured impulses or similar problems. Furthermore, after a loss of the supply voltage it is often necessary to return to a reference point, which can cause complications.
For these reasons, applications with a high emphasis on precision, or applications where it is complicated or not possible to return to the reference point, often use the absolute measuring system.

Absolute Measuring Systems
Using this measuring system, every position of the measurement range/angle is identified by a definite code on a glass or plastic disc. This code is represented on the disc in the form of light and dark regions within different tracks. This combination relates to an absolute numerical value.
Thus, the position value is always directly available, so counters are not necessary.
In addition, it is not possible to get continuously invalid values caused by interferences or loss of the supply voltage.
Movements which are done while the system is turned off are immediately measured after the system is powered up.
Movements which are done while the system is turned off are immediately measured after the system is powered up.